Вега БС-1
Вега БС-1 Вега БС-2
Вега БС-2 Вега БС-1.2
Вега БС-1.2 Вега БС-0.1
Вега БС-0.1 Вега БС-3
Вега БС-3 Антенна 868-01
Антенна 868-01 Антенна 868-01-А10
Антенна 868-01-А10 Вега СИ-11
Вега СИ-11 Вега СИ-12
Вега СИ-12 Вега СИ-13-232
Вега СИ-13-232 Вега СИ-13-485
Вега СИ-13-485 Вега СИ-21
Вега СИ-21 Вега СИ-23-232
Вега СИ-23-232 Вега СИ-23-485
Вега СИ-23-485 Вега СИ-22
Вега СИ-22 Вега NB-11
Вега NB-11 Вега NB-12
Вега NB-12 Вега NB-13
Вега NB-13 Вега NB-14
Вега NB-14 Вега NB-15
Вега NB-15 Бетар-Вега СХВЭ/СГВЭ
Бетар-Вега СХВЭ/СГВЭ Вега ТЛ-11
Вега ТЛ-11 Вега M-BUS-1
Вега M-BUS-1 Вега M-BUS-2
Вега M-BUS-2 Вега ТП-11
Вега ТП-11 Вега ТД-11
Вега ТД-11 Вега GM-2
Вега GM-2 Вега SH-2
Вега SH-2 Вега LM-1
Вега LM-1 Вега LM-210
Вега LM-210 Бетар-Вега СХВЭ/СГВЭ
Бетар-Вега СХВЭ/СГВЭ ЦЭ2726А R01
ЦЭ2726А R01 ЦЭ2726А W03
ЦЭ2726А W03 ЦЭ2727А R02
ЦЭ2727А R02 ЦЭ2727А B04
ЦЭ2727А B04 Меркурий 206
Меркурий 206 Бетар-Вега СГБМ-1,6
Бетар-Вега СГБМ-1,6 Вега ТС-11
Вега ТС-11 Вега Smart-UM0101
Вега Smart-UM0101 Вега Smart-HS0101
Вега Smart-HS0101 Вега Smart-MC0101
Вега Smart-MC0101 Вега Smart-WB0101
Вега Smart-WB0101 Вега ТД-21
Вега ТД-21 Вега Smart-AS0101
Вега Smart-AS0101 Вега Smart-MS0101
Вега Smart-MS0101 Вега Smart-SS0101
Вега Smart-SS0101 Вега ДП-1
Вега ДП-1 Вега USB-UART
Вега USB-UART Вега FSK Dongle
Вега FSK Dongle Вега Beacon TH
Вега Beacon TH Вега Beacon S
Вега Beacon S Вега RF32WL
Вега RF32WL  Вега RM868-UFL
Вега RM868-UFL Вега RM868-CPA
Вега RM868-CPA ВЕКТОР-101
ВЕКТОР-101 Вега Smart Tab
Вега Smart Tab Вега БП 3.6В
Вега БП 3.6В Вега Smart Tab-S
Вега Smart Tab-S Вега БС-4
Вега БС-4 Вега БС-4 PRO
Вега БС-4 PRO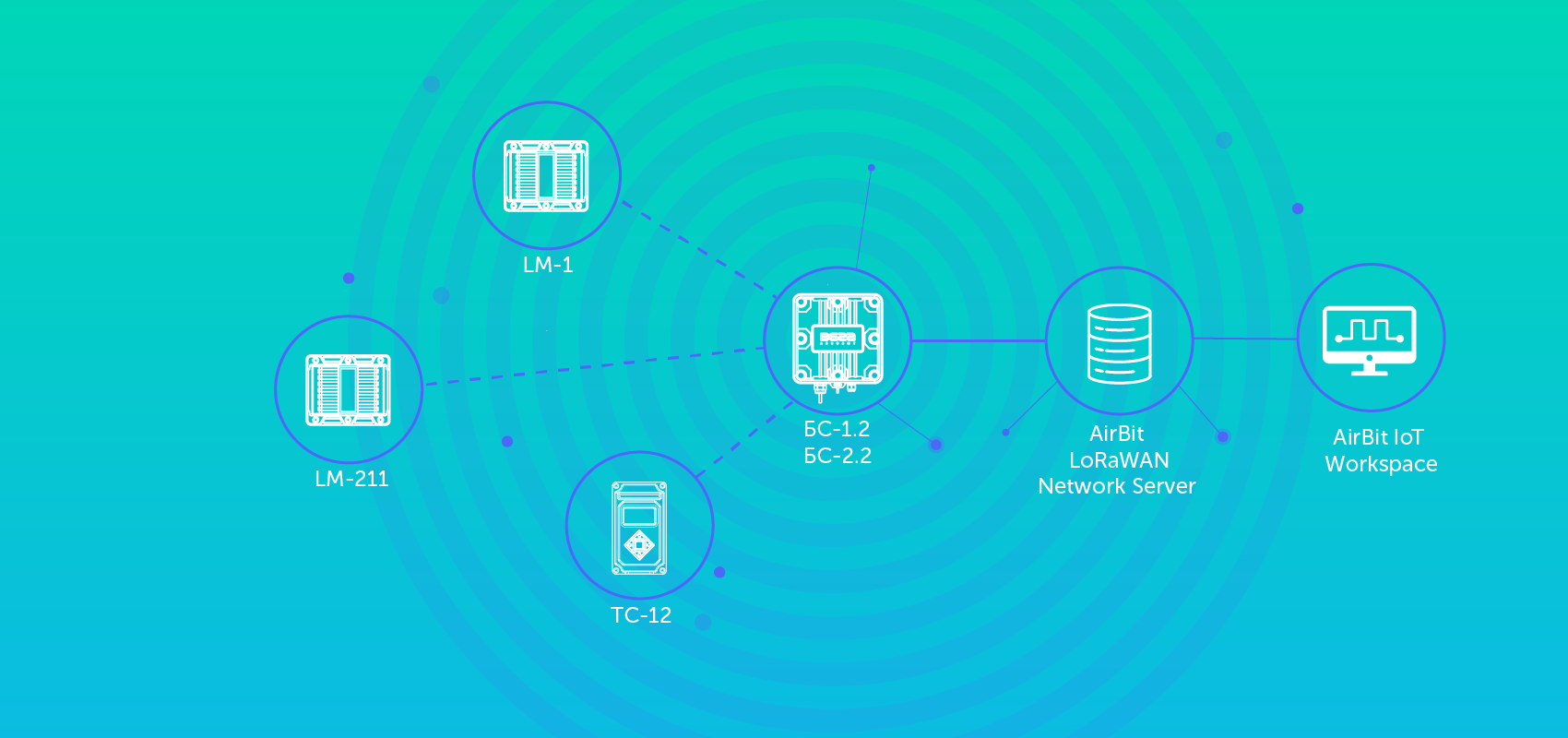
LoRa-геолокация позволяет определить координаты устройства, работающего в сети LoRaWAN, без использования GPS-приемника.
Конечное устройство LoRaWAN может быть обнаружено, если данные принимаются тремя или более базовыми станциями. Процесс определения местоположения при помощи метода TDoA основывается на триангуляции/трилатерации. Несколько БС одновременно получают один и тот же пакет, фиксируют время и отправляют данные на сетевой сервер. Синхронизация времени на шлюзах обеспечивается с точностью до наносекунд. Путем измерения временной задержки сигнала на каждой базовой станции можно определить разницу времени прибытия сигнала между станциями. Используя известные координаты базовых станций и временные разницы, можно применить триангуляцию для расчета местоположения объекта.
- Одними из основных преимуществ внедрения решения являются следующие:
- технология обеспечивает связь на больших расстояниях между конечными устройствами и БС, что дает возможность отслеживать объекты на большой площади;
- сеть может быть развернута в соответствии с потребностями клиентов для обеспечения непрерывного покрытия как внутри, так и вне помещений;
- LoRa-геолокация поддерживается любыми существующими конечными устройствами LoRaWAN, что исключает дополнительные затраты на их доработку;
- низкое энергопотребление устройств и низкая стоимость, именно то, что сейчас требует рынок;
- для определения местоположения объекта, не требуется большая скорость передачи данных, таким образом, низкая скорость передачи LoRa становится преимуществом, обеспечивая длительное время работы аккумулятора.
Работы были проведены в открытой местности: озеро Яхробольское в Некрасовском районе Ярославской области. Были развернуты три тестовых образца Базовой станции Вега БС-2.2 с поддержкой функции геолокации в вершинах треугольника со стороной 2-2,2 км.
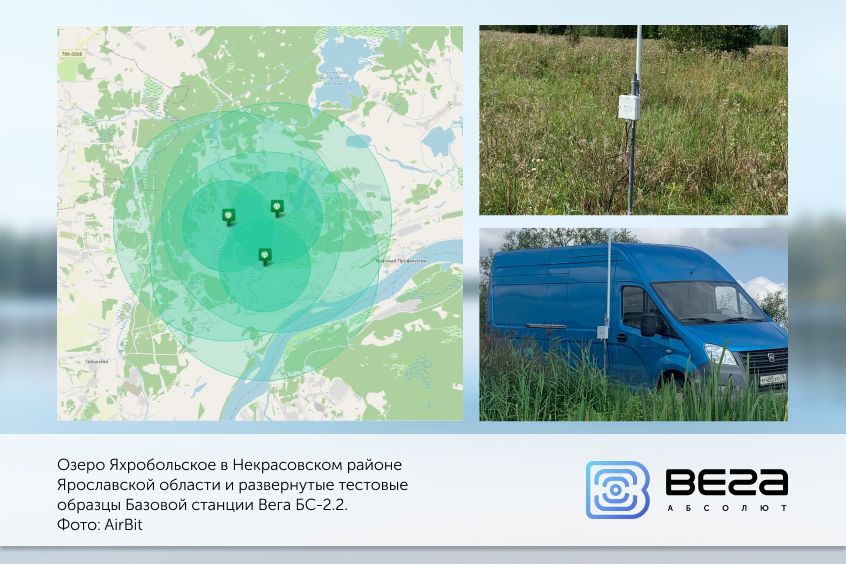
В качестве оконечных устройств использовались поисковые устройства Вега LM-1, Вега LM-211, тестер сети ТС-12, которые перемещались в лодке по озеру с различной скоростью.
Каждые 10 сек координаты местонахождения лодки фиксировались мобильным телефоном. Передача данных от устройств LoRaWAN осуществлялась каждые 5 минут с подтверждением. Пакеты поступали на сетевой сервер AirBit LoRaWAN Network Server.

Полученные данные были проанализированы с использованием критерия Шапиро-Уилка и стандартных методов математической статистики.
- Результаты:
- Было установлено, что точность определения положения объекта с помощью метода триангуляции укладывается в заявленный интервал, который опубликовал производитель чипов Semtech при анонсе новой микросхемы SX1303 LoRa Core
- Точность геолокации может составлять 75–150 м. в зависимости от сопутствующих факторов.